




0 说明
本篇文章主要了解了Itti显著性检测算法,并阅读相关的代码,最后在SAR图像上进行实验和测试。
原理部分本文主要参考了:https://blog.csdn.net/weixin_42647783/article/details/82532179
代码部分主要参考了https://zhuanlan.zhihu.com/p/441836726
1 简介
Itti视觉显著性模型的结构如下图[1]。

2 Itti算法
2.1 输入
文章中图片的尺寸为640×480静态彩色照片,包括RGB三个通道。
2.2 构建高斯金字塔
先将输入图像表示成0层的高斯金字塔。其中第0层表示输入图像,第1-8层分别采用3×3的高斯滤波器进行滤波和下采样,大小分别为输入图像的1/2、1/4、1/8…1/256,即可得到9个尺度下的三通道图像r(σ)、g(σ)、b(σ)r(\sigma)、g(\sigma)、b(\sigma)r(σ)、g(σ)、b(σ),其中σ∈{0..8}\sigma \in\{0 . .8\}σ∈{0..8}。
(1)构建亮度高斯金字塔
在九个尺度下计算I=(r+g+b)/3I=(r+g+b) / 3I=(r+g+b)/3,可以得到I(σ)I(\sigma)I(σ).
(2)构建颜色高斯金字塔
在9个尺度下,分别计算:
红色特征:R(σ)=r(σ)−(g(σ)+b(σ))/2R(\sigma)=r(\sigma)-(g(\sigma)+b(\sigma)) / 2R(σ)=r(σ)−(g(σ)+b(σ))/2
绿色特征:G(σ)=g(σ)−(r(σ)+b(σ))/2G(\sigma)=g(\sigma)-(r(\sigma)+b(\sigma)) / 2G(σ)=g(σ)−(r(σ)+b(σ))/2
蓝色特征:B(σ)=b(σ)−(r(σ)+g(σ))/2B(\sigma)=b(\sigma)-(r(\sigma)+g(\sigma)) / 2B(σ)=b(σ)−(r(σ)+g(σ))/2
黄色特征:Y(σ)=(r(σ)+g(σ))/2−∣r(σ)−g(σ)∣/2−b(σ)Y(\sigma)=(r(\sigma)+g(\sigma)) / 2-|r(\sigma)-g(\sigma)| / 2-b(\sigma)Y(σ)=(r(σ)+g(σ))/2−∣r(σ)−g(σ)∣/2−b(σ)
(3)构建方向金字塔
接下来采用Gabor滤波器构建方向金字塔O(σ,θ)O(\sigma, \theta)O(σ,θ),其中σ∈{0..8}\sigma \in\{0 . .8\}σ∈{0..8},θ∈{0∘,45∘,90∘,135∘}\theta \in\left\{0^{\circ}, 45^{\circ}, 90^{\circ}, 135^{\circ}\right\}θ∈{0∘,45∘,90∘,135∘}。
2.3 特征图的构建
获得亮度、颜色、方向高斯金字塔之后,采用Center-Surround方法,其中Center(c)表示精细尺度,Surround(s)表示粗尺度计算对应的特征图。计算方法为:
I(c,s)=∣I(c)⊖I(s)∣I(c, s)=|I(c) \ominus I(s)|I(c,s)=∣I(c)⊖I(s)∣
RG(c,s)=∣(R(c)−G(c))⊖(G(s)−R(s))∣R G(c, s)=|(R(c)-G(c)) \ominus(G(s)-R(s))|RG(c,s)=∣(R(c)−G(c))⊖(G(s)−R(s))∣
BY(c,s)=∣(B(c)−Y(c))⊖(Y(s)−B(s))∣B Y(c, s)=|(B(c)-Y(c)) \ominus(Y(s)-B(s))|BY(c,s)=∣(B(c)−Y(c))⊖(Y(s)−B(s))∣
O(c,s,θ)=∣O(c,θ)⊖O(s,θ)∣O(c, s, \theta)=|O(c, \theta) \ominus O(s, \theta)|O(c,s,θ)=∣O(c,θ)⊖O(s,θ)∣
其中 c∈{2,3,4}c \in\{2,3,4\}c∈{2,3,4} ,而 s=c+δ,δ∈{3,4}s=c+\delta, \delta \in\{3,4\}s=c+δ,δ∈{3,4} 。上面的⊖\ominus⊖表示将粗尺度进行插值到精细尺度后做矩阵元素相减。III表示亮度特征图,RG(c,s)R G(c, s)RG(c,s)表示颜色特征图,OOO表示方向特征图。
2.4 显著图的构建
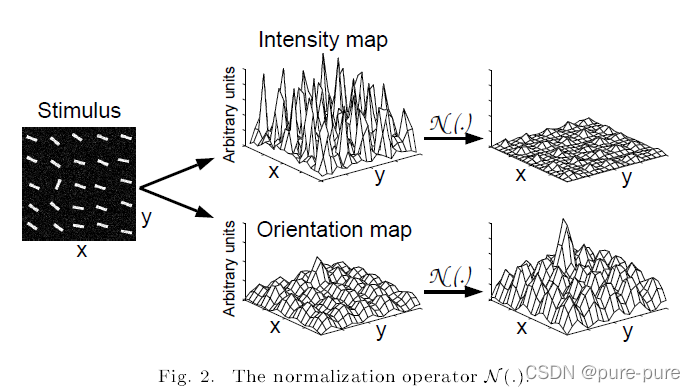
文章中提出了一个特征图归一化操作运算符N(⋅)\mathcal{N}(\cdot)N(⋅),可以增强存在少量活动峰(即尖锐值)的特征图,抑制存在大量活动峰的特征图。操作方法如下:
(1)首先对输入的特征图归一化到范围[0...M][0 . . . M][0...M];
(2) 找到该特征图的全局最大值M所在位置并计算其他所有局部最大值的均值 mˉ\bar{m}mˉ ,然后把整 个特征图同乘以 (M−mˉ)2(M-\bar{m})^{2}(M−mˉ)2 ;
如下图所示,中间列上图便是存在大量活动峰的特征图,经过 N(⋅)\mathcal{N}(\cdot)N(⋅) 操作后得到的特征图整体 较为平滑,活动峰被抑制,中间列下图是存在少量活动峰的特征图,经过 N(⋅)\mathcal{N}(\cdot)N(⋅) 操作后得到的特征图在 原有的活动峰处得到了增强。
通过以上操作即可获得最后的视觉显著图,计算方法如下:
Iˉ=⊕4⊕c=2s=c+3c+4N(I(c,s))\bar{I}=\stackrel{4}{\oplus} \underset{c=2 s=c+3}{\oplus}^{c+4} \mathcal{N}(I(c, s))Iˉ=⊕4c=2s=c+3⊕c+4N(I(c,s))
Cˉ=⊕=24⊕⊕s=c+3[N(RG(c,s))+N(BY(c,s))]\bar{C}=\stackrel{4}{\oplus=2}{\oplus} \underset{s=c+3}{\oplus}[\mathcal{N}(R G(c, s))+\mathcal{N}(B Y(c, s))]Cˉ=⊕=24⊕s=c+3⊕[N(RG(c,s))+N(BY(c,s))]
Oˉ=∑θ∈{0∘,45∘,90∘,135∘}N(⊕4⊕c+4c=2N(O(c,s,θ)))\bar{O}=\sum_{\theta \in\left\{0^{\circ}, 45^{\circ}, 90^{\circ}, 135^{\circ}\right\}} \mathcal{N}(\stackrel{4}{\oplus} \underset{c=2}{\stackrel{c+4}{\oplus}} \mathcal{N}(O(c, s, \theta)))Oˉ=∑θ∈{0∘,45∘,90∘,135∘}N(⊕4c=2⊕c+4N(O(c,s,θ)))
其中⊕{\oplus}⊕是指将多个图像调整至同一个尺寸后相加的操作,于是得到了亮度、颜色和方向显著图,最终的显著图S为,
S=(N(Iˉ)+N(Cˉ)+N(Oˉ))/3S=(\mathcal{N}(\bar{I})+\mathcal{N}(\bar{C})+\mathcal{N}(\bar{O})) / 3S=(N(Iˉ)+N(Cˉ)+N(Oˉ))/3
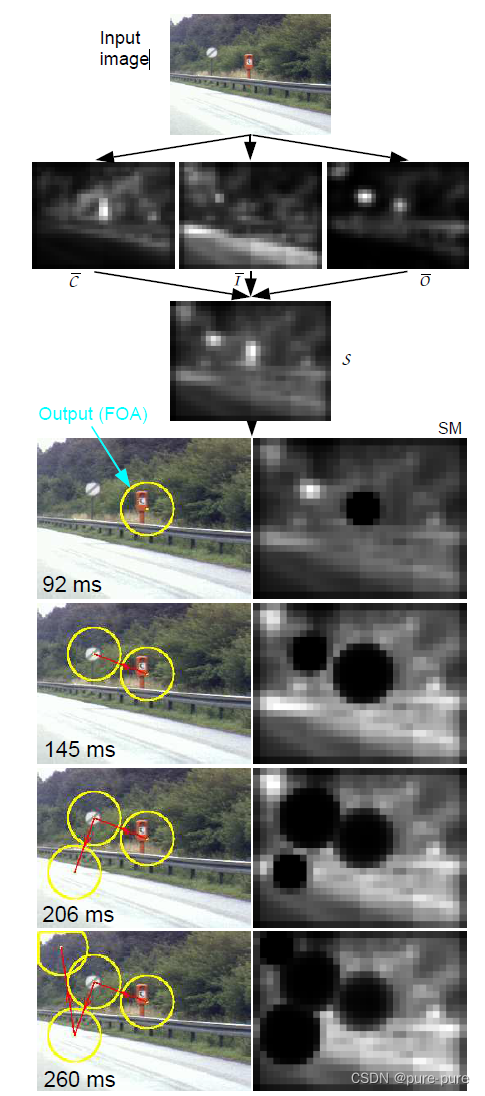
一般在目标检测中,根据设定的阈值检测显著性目标,设定的阈值逐渐下降,得到的显著性目标就会逐渐增多,同时检测时间也会增加,论文实验如图所示。
3 论文实验
论文在不同的加性噪声下对同一图像的检测效果如下图所示
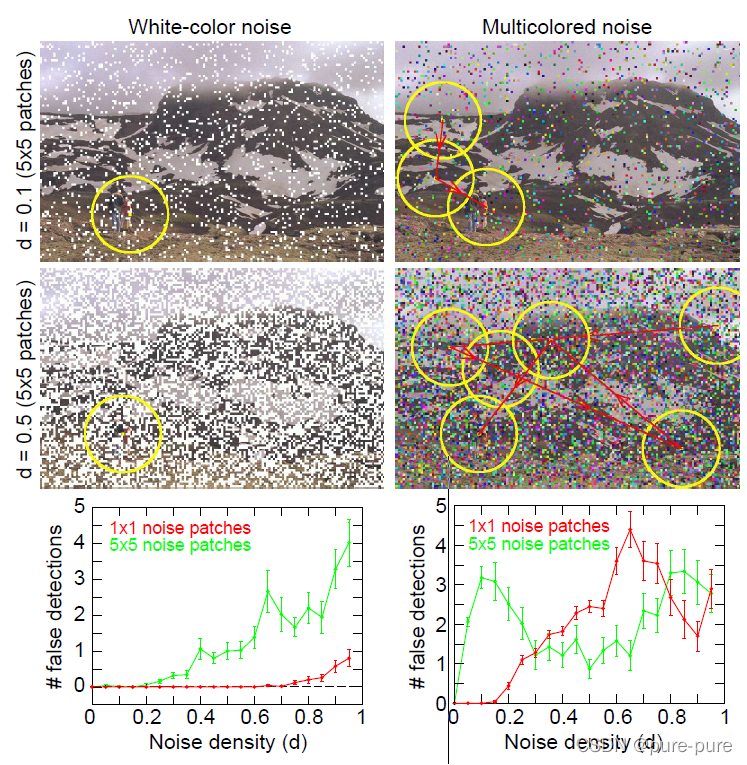
论文还对比了Reinagel和Zador提出的SFC(Spatial Frequency Content,空间频率内容模型)在检测目标上的效果,实验结果表明,ITTI模型对于噪声具有较好的鲁棒性,而SFC模型则做没有[1]。实验对比如下图所示,(a)是待处理的图像,(b)是ITTI模型得到的视觉显著图,©是SFC模型得到的显著图,(d)是两种模型对检测目标的标记,标记显著图中大于最大值的98%的部分,其中黄色的标记是ITTI模型得到的结果,红色的标记是SFC模型得到的结果。

4 相关代码
自己整理的相关代码(matlab)整理如下:
链接:https://pan.baidu.com/s/1DNKAPcIyVFsGHHVdGr_YRw
提取码:ynk8

文件夹说明:(1)input中为SAR图像示例图片;(2)myitti2.m为主程序文件;(3)paper43.m为我整理的,复现论文43[4]的改良的Itti算法,c={2}c=\{2\}c={2},s={4,5,6}s=\{4,5,6\}s={4,5,6}。
5 SAR图像实验结果
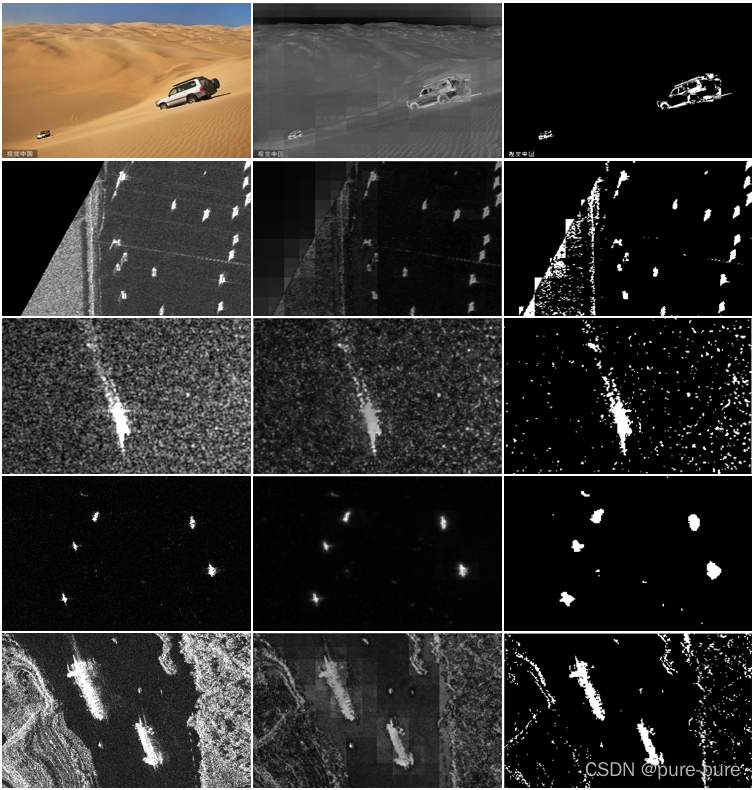
下图是在paper43.m运行出现的结果,可以发现对于彩色图片来说可以很好的检测,但是对于SAR图像来说效果并不是很好。会出现锯齿状的边缘,没有初始图像好。作为引导显著性网络有待考量,还需要经过网络的学习得到。另一个思考就是对于c和s的设置属于超参数,对于不同尺度的目标进行检测的时候需要设置不同的值。
6 参考文献
[1]L. Itti, C. Koch and E. Niebur, “A model of saliency-based visual attention for rapid scene analysis,” in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 20, no. 11, pp. 1254-1259, Nov. 1998, doi: 10.1109/34.730558.
[2]https://blog.csdn.net/weixin_42647783/article/details/82532179
[3]https://zhuanlan.zhihu.com/p/441836726
[4]L. Du, L. Li, D. Wei and J. Mao, “Saliency-Guided Single Shot Multibox Detector for Target Detection in SAR Images,” in IEEE Transactions on Geoscience and Remote Sensing, vol. 58, no. 5, pp. 3366-3376, May 2020, doi: 10.1109/TGRS.2019.2953936.


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










