




7.1创建第一个仿真工程:信号灯
需求:模拟两个ecu之间的通信
分析:1.创建2个节点(switch模块和light模块)
2.创建两个控制面板(开关模块和指示灯面板)
3.通过CAPL代码实现两个节点通信
工程保存:新建FirstDemo目录,新建 CAN500kBaud1ch 保存 FirstDemo.cfg
7.2添加CAN数据库
7.2.21新建CAN数据库
新建一个含有报文Msg1和信号bsSwitch数据库
(1)单击tools功能区打开CANdb++Editor(CAN数据库编辑器)
(2)在CANdb++Editor界面单击File->create database 并选择can template。dbc
(3)将新建文件命名FirstDemo.dbc并保存在FirstDemo
7.2.2添加报文和信号
在Messages下面创建一条报文Msg1,单击ok
在Signals下面创建一个信号bsSwitch,单击ok
将信号bsSwitch拖曳到报文Msg1下面,这样bsSwitch变成报文Msg1一条信号
7.2.3添加数据库到工程中
7.3定义系统变量
单击Environment功能区打开System Variables 创建一个系统变量svLight Namespace:MyNamespace Name:svLight DataType:Integer
单击Environment功能区打开System Variables 创建一个系统变量svSwitch Namespace:MyNamespace Name:svSwitch DataType:Integer
7.4创建仿真面板
7.4.1创建开关面板
7.4.2创建指示灯面板
7.5创建网络节点
7.5.1添加网络节点
7.5.2添加代码
7.5.3添加Switch代码
7.5.4添加light代码
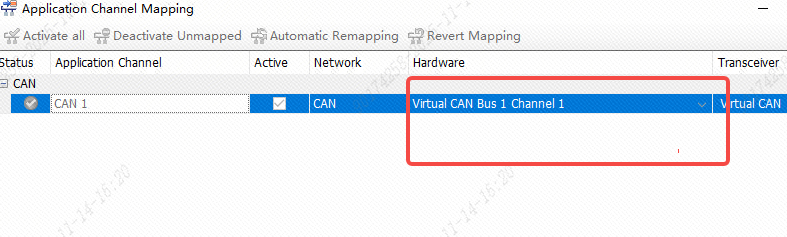
7.6工程运行测试:书上没说的两个点
注意:信号要切换虚拟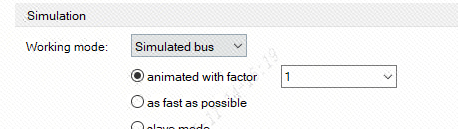
7.7查看trace信息


















 1035
1035

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










