




文章目录
1. 需求分析
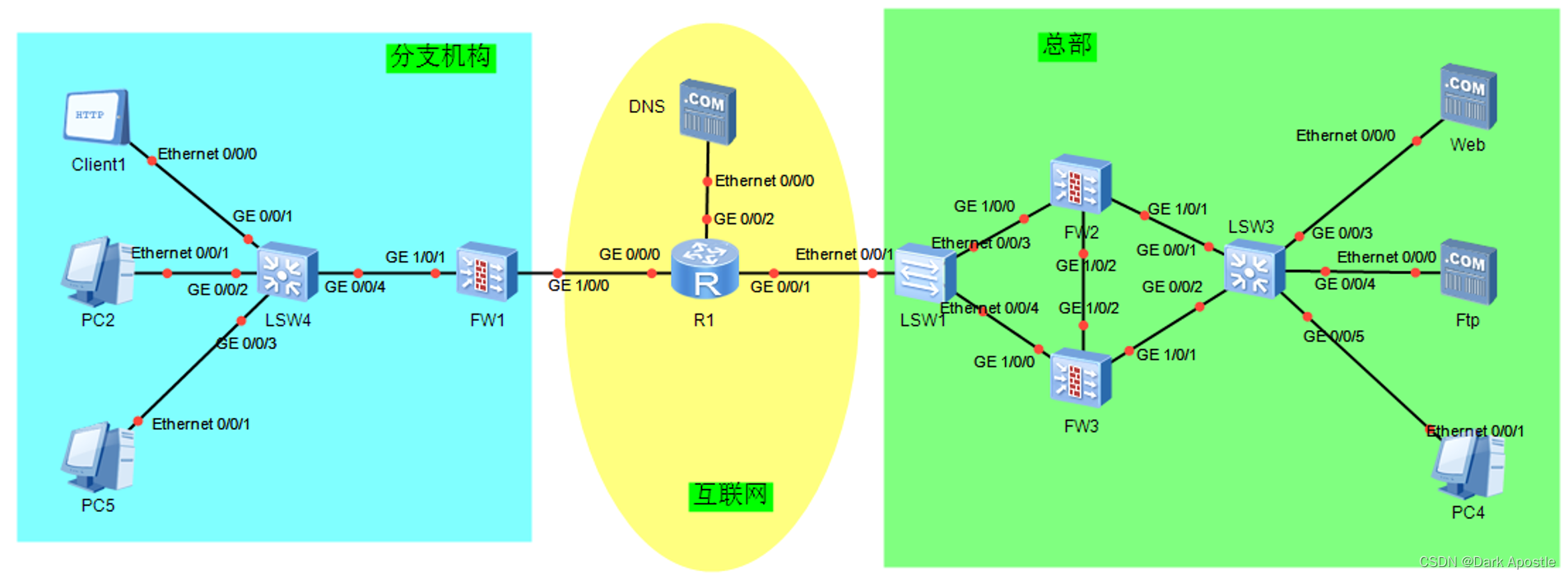
组网拓扑:
组网需求:
-
分支机构内部业务Vlan为vlan 10与vlan 20,通过FW1的DHCP服务获取相关网络配置信息。分支机构中Vlan 30为外网Vlan,PC5只可以访问公网,无法通过IPSec访问总部内网资源。
-
分支机构Client1与PC2需要访问总部内部的FTP服务器,为保证数据访问的安全性,采用IPSec VPN的方式通过公网进行资源访问。
-
为保证分支机构访问总部数据的可靠性,总部出口处采用双击热备的方式进行组网。
2. 地址规划
终端设备地址规划:
| 名称 | 所属Vlan | IP地址/掩码 |
|---|---|---|
| Client1 | 10 | 10.1.1.2/24【不支持DHCP,采用手工静态配置】 |
| PC2 | 20 | DHCP获取【网段10.1.1.0/24】 |
| PC5 | 30 | DHCP获取【网段192.168.30.0/24】 |
| 公网DNS | / | 8.8.8.8 |
| Web | 100 | 172.18.17.10/24 |
| FTP | 200 | 192.168.2.2/24 |
| PC4 | 300 | 192.168.3.2/24 |
网络设备地址规划:
| 名称 | 接口 | IP地址/掩码 | 备注 |
|---|---|---|---|
| FW1 | GE1/0/1.10 | 10.1.1.1/24 | Vlan10网关地址 |
| GE1/0/1.20 | 10.1.2.1/24 | Vlan20网关地址 | |
| GE1/0/1.30 | 192.168.30.1/24 | Vlan30网关地址 | |
| GE1/0/0 | 111.160.10.2/30 | 外网出口地址 | |
| R1 | GE0/0/0 | 111.160.10.1/30 | 分支机构互联网网关地址 |
| GE0/0/2 | 8.8.8.1/24 | 公网DNS网关地址 | |
| GE0/0/1 | 111.160.20.1/30 | 总部互联网网关地址 | |
| FW2 | GE1/0/0 | 172.16.1.1/27 | 互联网侧实地址,虚地址为111.160.20.2/30 |
| GE1/0/2 | 1.1.1.1/24 | 心跳地址 | |
| GE1/0/1 | 192.168.100.3/27 | 内网侧实地址,虚地址为192.168.100.1/27 | |
| FW3 | GE1/0/0 | 172.16.1.2/27 | 互联网侧实地址,虚地址为111.160.20.2/30 |
| GE1/0/2 | 1.1.1.2/24 | 心跳地址 | |
| GE1/0/1 | 192.168.100.4/27 | 内网侧实地址,虚地址为192.168.100.1/27 | |
| LSW3 | Vlanif100 | 172.18.17.1/24 | Vlan100网关地址 |
| Vlanif200 | 192.168.2.1/24 | Vlan200网关地址 | |
| Vlanif300 | 192.168.3.1/24 | Vlan300网关地址 | |
| Vlanif1000 | 192.168.100.2/27 | 上联防火墙地址 |
3. 防火墙接口区域规划
| 名称 | 接口 | 所属区域 |
|---|---|---|
| FW1 | GE1/0/1 | Trust |
| GE1/0/1.10 | Trust | |
| GE1/0/1.20 | Trust | |
| GE1/0/1.30 | Trust | |
| GE1/0/0 | Untrust | |
| FW2 | GE1/0/0 | Untrust |
| GE1/0/2 | DMZ | |
| GE1/0/1 | Trust | |
| FW3 | GE1/0/0 | Untrust |
| GE1/0/2 | DMZ | |
| GE1/0/1 | Trust |
4. 分支机构内网配置
LSW4交换机配置
- 创建Vlan
vlan batch 10 20 30
- 配置接口模式,连接终端的接口开启边缘端口加快转发
interface GigabitEthernet0/0/1
port link-type access
port default vlan 10
stp edged-port enable
#
interface GigabitEthernet0/0/2
port link-type access
port default vlan 20
stp edged-port enable
#
interface GigabitEthernet0/0/3
port link-type access
port default vlan 30
stp edged-port enable
#
interface GigabitEthernet0/0/4
port link-type trunk
undo port trunk allow-pass vlan 1
port trunk allow-pass vlan 10 20 30
stp edged-port enable
FW1防火墙配置
防火墙初始用户名与密码:admin/Admin@




















 1687
1687

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










