




 本文介绍了自动驾驶仿真测试的五个层次,从模型/软件在环测试到车辆在环测试,详细阐述了每个层次的特点和测试内容,包括虚拟环境、硬件部件的使用情况,以及测试目的和难点。
本文介绍了自动驾驶仿真测试的五个层次,从模型/软件在环测试到车辆在环测试,详细阐述了每个层次的特点和测试内容,包括虚拟环境、硬件部件的使用情况,以及测试目的和难点。
|作者版权所有,未经许可谢绝转载,转载请联系adsimtest@163.com。
“本篇介绍下什么是仿真测试的不同层次。”
自动驾驶汽车决策过程如下图所示:由各种传感器感知环境状态,并发送给控制器;控制器融合各种传感器的信号,并根据功能和算法的定义给出控制指令;最终由车辆上的执行器执行,使得车辆自动行驶。
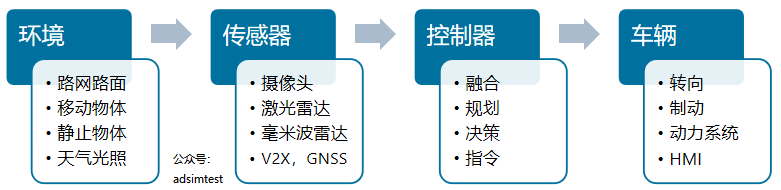
根据上述提到的环境、传感器、控制器和车辆四种元素的状态的不同(是否用真实部件),可以进行不同层次的仿真测试。

01.层次一
这个层次的仿真测试,没有真实的部件,一般称为模型/软件在环测试,主要测试内容为自动驾驶的控制算法。其结构如下图所示:
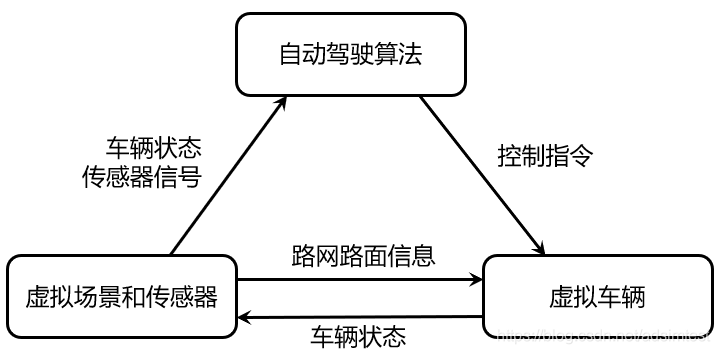
自动驾驶算法可以是Simulink模型的格式,也可以是C/Python等代码的格式。虚拟场景和传感器由VTD、PreScan等场景仿真软件提供。虚拟车辆由CarSim、veDYNA等车辆动力学软件提供。可以在PC环境中运行三者的联合仿真,进行测试。
其中的虚拟传感器可以采用理想传感器,发送真值数据;也可以采用复杂传感器,考虑到激光雷达、毫米波雷达等不同传感器的特性,发送带误差的数据。
02.层次二
这个层次的仿真测试,控制器采用真实部件,这个真实部件可以是量产版的部件或者快速原型机,也可以是近来自动驾驶开发经常使用的工控机。一般称为硬件在环测试。其结构如下图所示:



















:仿真测试的不同层次&spm=1001.2101.3001.5002&articleId=107453236&d=1&t=3&u=f348cf160a2942adad215ec914222c83)
 8520
8520

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










