






原创代码,包运行成功
程序简介
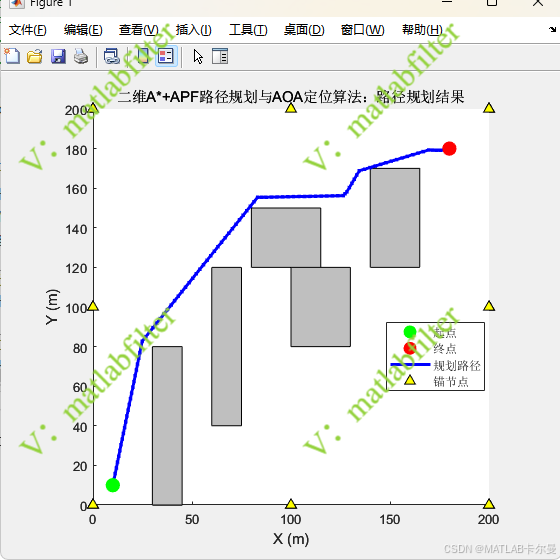
二维 A*+APF 路径规划与 AOA 定位联合仿真程序。整体流程是先在二维栅格地图中设置起点、终点、矩形障碍物和锚节点,然后利用 A* 算法生成初始避障路径,再通过人工势场法对路径进行平滑和局部优化,最终将优化后的路径点作为运动轨迹真值,在各路径点处模拟 AOA 方位角量测,并利用多锚节点角度约束完成二维位置估计。
本程序采用 A* 与 APF 串联的混合规划结构。首先利用 A* 在二维栅格地图上完成全局搜索,得到一条严格避障的引导路径;随后对引导路径进行稠密化,并基于人工势场法引入三类局部作用力:
- 相邻路径点之间的平滑力,用于减弱折线感;
- 指向终点的吸引力,用于保持整体前进方向;
- 障碍物附近的斥力,用于主动远离矩形障碍物边界。
每次 APF 修正都会重新检查与前后路径段的碰撞关系,仅接受仍然满足避障约束的更新,因此可以在不破坏全局可达性的前提下优化路径形状。
运行结果
运行代码后,程序会完成 二维A*+APF路径规划与AOA定位算法 仿真。程序先在二维平面上生成避障路径,再沿路径点执行 AOA 定位,并输出轨迹、坐标分量和定位误差统计。
路径规划结果图:
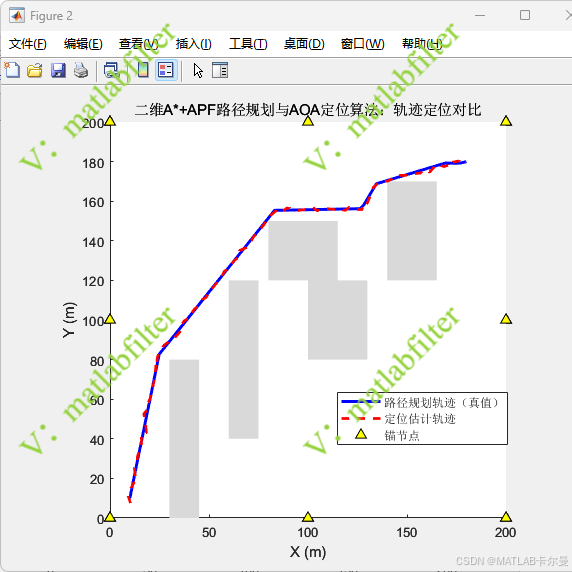
路径规划轨迹与定位估计轨迹对比图:
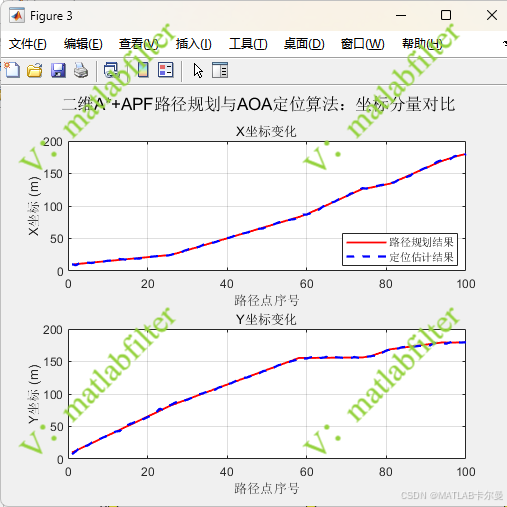
各坐标分量随路径点序号变化曲线:
定位误差曲线:
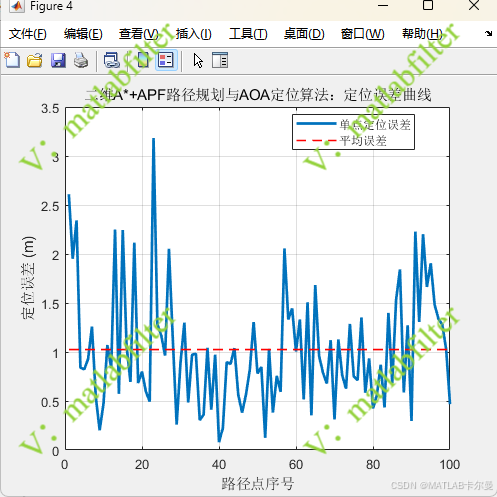
命令行会输出路径长度、路径点数、规划迭代次数、平均定位误差、最大定位误差、最小定位误差和 RMSE 等统计结果。

MATLAB源代码
部分代码如下:
%% 二维A*+APF路径规划与AOA定位算法
% 作者: matlabfilter(V同号,例程获取、代码定制、讲解)
% 2026-06-11/Ver2
%
% 程序流程:
% 1. 完成A*+APF二维栅格路径规划,将规划路径点作为运动轨迹真值;
% 2. 在每个路径点处模拟AOA量测;
% 3. 使用本脚本对应的定位模型估计路径点位置;
% 4. 使用普通figure窗口绘制规划轨迹、定位轨迹、坐标分量和误差曲线。
clear; clc; close all;
rng(0);
%% 参数设置
algorithmName = '二维A*+APF路径规划与AOA定位算法';
measureName = 'AOA';
sigmaAngle = 0.012; % AOA角度噪声,单位rad
%% 路径规划
[rawPath, anchors, mapLimit, obstacles, planStats] = planAstarApf2D();
%% 沿规划轨迹进行定位仿真
[estPath, posErr, iterUsed] = runAoaLocalization2D(rawPath, anchors, sigmaAngle);
%% 结果绘图与输出
plotPlanningResult(rawPath, anchors, mapLimit, obstacles, algorithmName);
plotLocalizationResult(rawPath, estPath, anchors, obstacles, mapLimit, algorithmName);
plotCoordinateResult(rawPath, estPath, algorithmName);
plotErrorResult(posErr, algorithmName);
printSummary(rawPath, posErr, iterUsed, planStats, algorithmName, measureName);
%% 本地函数
完整代码也可通过下方链接获取:
https://download.csdn.net/download/callmeup/92977662
扩展方向
- 扩展到三维路径规划与三维 AOA 定位
- 加入动态障碍物与实时重规划机制
- 优化用于定位的锚节点布局与定位精度评估
如需帮助,或有导航、定位滤波相关的代码定制需求,可从个人主页左侧联系我


















 163
163

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












