




三维移动目标的多基站AOA/距离辅助IMM非线性滤波定位仿真程序。程序以AOA角度观测为主要定位信息,并引入距离量测作为精度增强辅助,在随机布设的n个三维基站条件下,对机动目标的空间位置、速度和运动模型概率进行联合估计。代码内置分段机动轨迹,包括匀速运动段和常加速度机动段,可较好地模拟移动目标在不同运动状态之间切换的跟踪场景。
原创代码,请勿翻卖
程序详解
测距信息作为辅助约束引入,带距离辅助的AOA定位是在原纯AOA定位基础上新提出的精度增强方法,通常可获得更高定位精度
运动轨迹与模型设置
为了让 IMM 模型概率具有明显切换效果,当前轨迹采用“匀速段 + 分段常加速度机动段”:0-6 s、12-18 s、25-31 s 为相对匀速段,6-12 s、18-25 s、31 s 之后为加速/转向机动段。
CV 模型的过程噪声已收紧,CA 模型保留加速度状态并增强对持续加速度的适配能力。
使用方式
在 main_AOA_dist_IMM_EKFUKFCKF_Ver1.m 开头修改:
num_station = 8;
filter_type = 'UKF'; % 可选:'EKF'、'UKF'、'CKF'
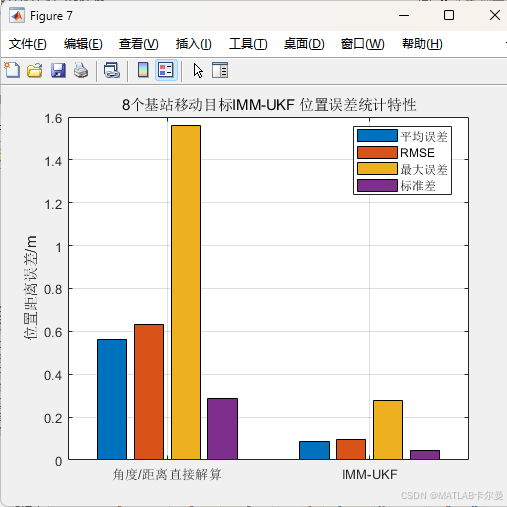
输出结果
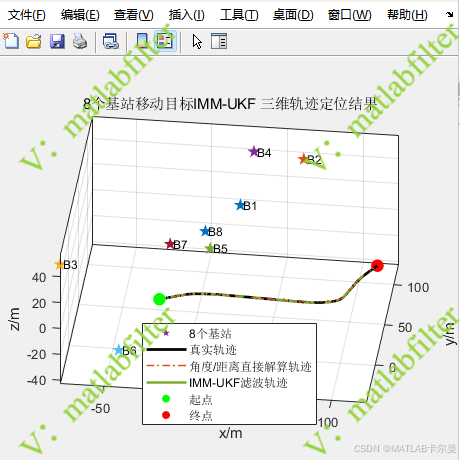
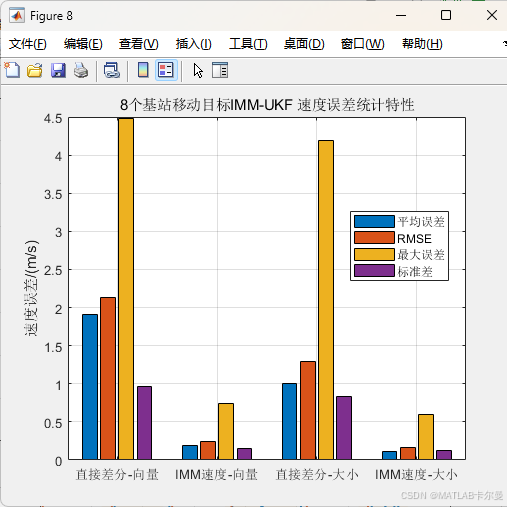
程序会输出轨迹、位置误差、速度误差、IMM 模型概率和误差统计图。IMM 概率图中用浅色背景标出机动时间段,便于观察 CV/CA 概率随运动状态变化的切换效果。
以UKF为例:
定位结果展示:
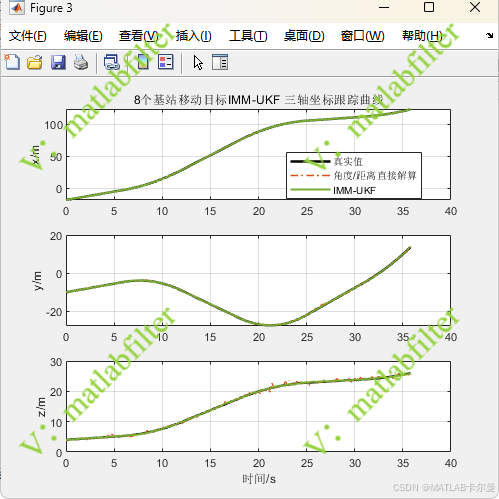
误差曲线:
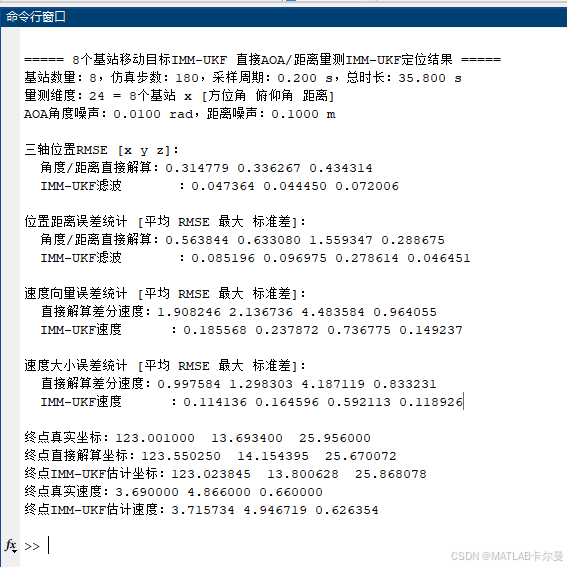
命令行窗口的输出:
录屏演示:
MATLAB源代码
部分代码如下:
% n基站移动目标IMM-EKF/UKF/CKF可选择版本,AOA定位为主、测距辅助的非线性滤波
% 作者微信:matlabfilter(可联系我获取完整例程、个性化定制和讲解)
% 2026-06-08/Ver1:通过filter_type选择EKF、UKF或CKF
clear; clc; close all;
rng(0);
num_station = 8; % 可自行修改基站数量
filter_type = 'UKF'; % 可选:'EKF'、'UKF'、'CKF'
title_prefix = sprintf('%d个基站移动目标IMM-%s', num_station, filter_type);
%% 参数设置
num_step = 180;
dt = 0.2;
station_scale = 35;
AOA_noise = 1e-2;
distance_noise = 0.1;
model_transition = [0.96, 0.04;
0.05, 0.95];
if num_station < 2 || mod(num_station, 1) ~= 0
error('num_station必须为不小于2的整数,三维定位建议设置为4或更多。');
end
t_axis = (0:num_step-1)' * dt;
%% 构造真实移动目标轨迹
% 构造分段机动移动目标轨迹:匀速段 + 常加速度机动段
% 这样CV模型会在匀速段占优,CA模型会在加速/转向段概率上升。
maneuver_acc = zeros(num_step, 3);
for k = 1:num_step
t = t_axis(k);
if t < 6
maneuver_acc(k, :) = [0.00, 0.00, 0.00];
elseif t < 12
maneuver_acc(k, :) = [0.85, -0.55, 0.18];
elseif t < 18
maneuver_acc(k, :) = [0.00, 0.00, 0.00];
elseif t < 25
maneuver_acc(k, :) = [-0.95, 0.75, -0.16];
elseif t < 31
maneuver_acc(k, :) = [0.00, 0.00, 0.00];
else
maneuver_acc(k, :) = [0.55, 0.42, 0.10];
end
end
position = zeros(num_step, 3);
true_velocity = zeros(num_step, 3);
position(1, :) = [-18.0, -10.0, 4.0];
true_velocity(1, :) = [2.60, 0.90, 0.22];
for k = 2:num_step
a = maneuver_acc(k-1, :);
true_velocity(k, :) = true_velocity(k-1, :) + a * dt;
position(k, :) = position(k-1, :) + true_velocity(k-1, :) * dt + 0.5 * a * dt^2;
end
true_speed = vecnorm(true_velocity, 2, 2);
完整代码也可通过下方链接获取:
https://download.csdn.net/download/callmeup/92972881
如需帮助,或有导航、定位滤波相关的代码定制需求,可从个人主页左侧联系我


















 165
165

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












