




如需帮助,或有导航、定位滤波相关的代码定制需求,可从个人主页左侧联系我
三维移动目标的多基站AOA/距离辅助IMM非线性滤波定位仿真程序。程序以AOA角度观测为主要定位信息,并引入距离量测作为精度增强辅助,在随机布设的n个三维基站条件下,对机动目标的空间位置、速度和运动模型概率进行联合估计。代码内置分段机动轨迹,包括匀速运动段和常加速度机动段,可较好地模拟移动目标在不同运动状态之间切换的跟踪场景。
订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
运行结果
本程序是 n 基站移动目标 IMM 综合版本,可通过 filter_type 在 EKF、UKF、CKF 三种非线性滤波更新之间切换。以AOA角度量测为定位主体,并将距离作为辅助量测进入滤波器,主程序末尾包含所有局部函数,不需要单独函数 .m 文件。
以UKF为例:
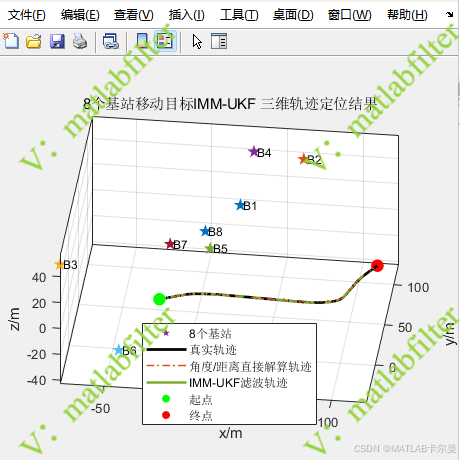
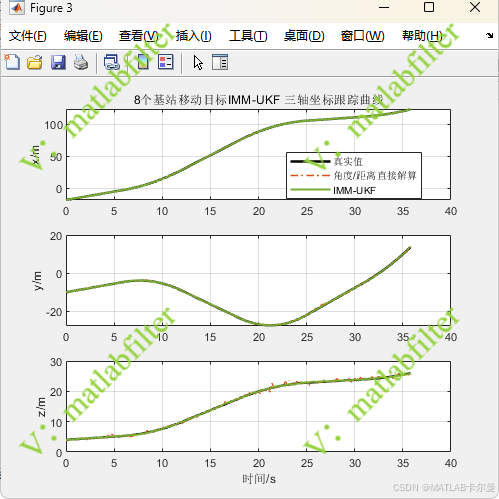
定位结果展示:
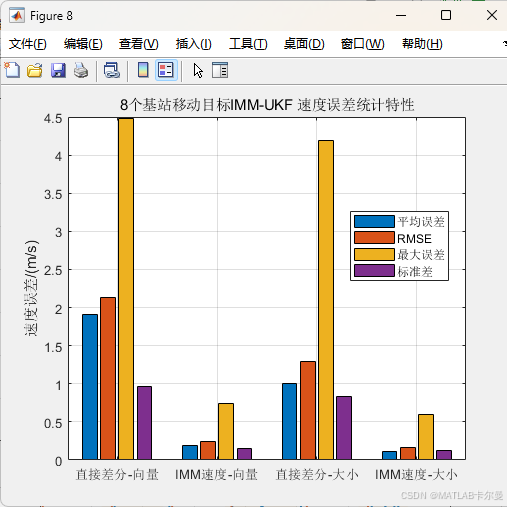
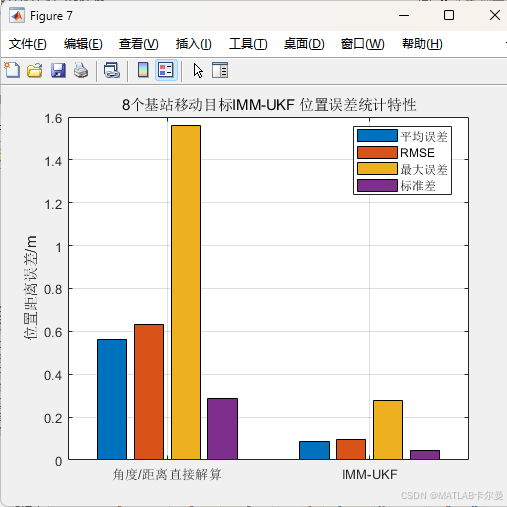
误差曲线:
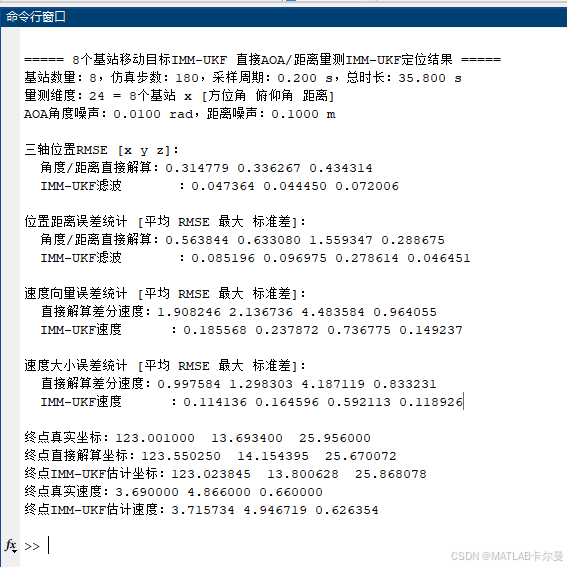
命令行窗口的输出:
录屏演示:

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 725
725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












