



「6S管理实战专栏」第6篇
你好,我是杨逢昌。专注6S管理实战,助你打造高效工厂。
清洁(Seiketsu)是6S的第四个S,核心任务是将前面三个S(整理、整顿、清扫)的做法标准化、制度化。
没有清洁,前面做的再好也会反弹。
清洁的目标是:任何人来检查,标准都一样;任何时间检查,状态都一样。
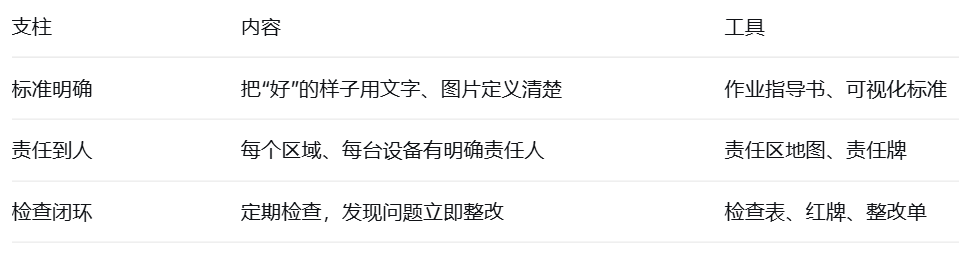
一、清洁的三大支柱
二、将标准可视化(让标准一目了然)
工具定置图:在工具柜门上贴实物照片,标注每样工具的位置
清扫责任图:在车间入口贴平面图,标注各区域责任人
点检表上墙:点检表挂在设备旁,填写方便,检查直观
色标管理:用颜色区分状态(绿色=合格,黄色=待检,红色=不合格)
三、建立日常检查制度
每日:操作工班前点检,班后5S确认(5分钟)
每周:班组长组织一次全面检查,打分公示(30分钟)
每月:厂长带队巡查,与绩效挂钩(1小时)
检查打分表示例:

四、清洁推进的三个“不要”
不要只检查不整改:发现问题必须定人、定时、定措施
不要只扣分不激励:设立“6S红旗”或小额奖励,正向引导
不要标准定得太高:先做到60分,再逐步提高
【核心要点总结】
清洁的核心是:标准化+可视化
标准:要有图有真相,人人看得懂
检查:要形成闭环(查→改→验)
激励:比惩罚更有效
【行动建议】
本周选一个区域(如工具室、一条产线),做三件事:
把现有定置位置拍照,做成《定置图》张贴
画出《清扫责任图》,明确各区域责任人
设计一张《6S检查打分表》,试行一周
评论区分享你的定置图或打分表,我帮你点评优化。
【下一篇预告】
明天“素养”——如何让员工从“要我做”变成“我要做”。
【作者简介】
国家注册管理咨询师|广东省企业管理咨询协会第三届理事|顺德职业技术大学企业导师|6S管理实战专家|企业效能教练


















 539
539

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










