



一种用于压电陶瓷堆叠执行器的驱动电路的研究与设计
一、引言
压电陶瓷是一种能够实现机械能与电能相互转换的智能材料,具有强驱动能力、卓越的感知能力和快速响应的特点。它广泛应用于结构驱动[1], 能量收集[2], 振动控制[3], 结构健康监测[4], 振动传感器[5]等领域。特别是利用压电陶瓷叠堆驱动器对被控对象进行主动振动控制,具有广阔的应用前景。
主动振动控制的具体实现是引入一个与被控对象振动方向相反的驱动力作为振动抑制元件的激励,然后通过不同的算法控制振动抑制元件来响应干扰[6]。图1显示了一个典型的主动振动控制实验平台。压电传感器用于检测被控对象的振动状态。示波器用于监测压电传感器产生的电压响应曲线。振动电机由稳压直流电源供电,作为振源。光纤位移传感器可有效监测被控对象的振动幅度,并将数据发送至个人计算机。个人计算机对检测到的数据进行处理并向单片机控制器发送相应指令,由单片机控制器控制的压电陶瓷堆叠执行器驱动电路即可向压电陶瓷叠堆驱动器输出相应的驱动电压,从而使执行器根据驱动电压反向振动,以抑制被控对象的振动。
用于振动控制的压电执行器主要有两种,即一体式压电陶瓷驱动器和多层压电陶瓷驱动器。前者产生的驱动力较小,主要用于柔性结构,例如用于板状结构振动控制的 MFC[7]。后者在低压驱动下可在纵向堆叠方向产生较大的位移。后者的制造工艺是将多个压电陶瓷片形成纵向堆叠结构,也称为压电陶瓷叠堆驱动器[8]。
压电陶瓷堆叠由多层单片压电陶瓷片组成,从电气性能上看可视为多个电容器并联。当电信号驱动施加到压电陶瓷堆叠时,经过充放电过程[9],由于压电效应将产生外场响应。并且由于压电陶瓷堆叠的特殊结构,也可通过直流电压进行驱动[10]。本文设计了一种电压可达1千伏的直流电压驱动电路,充电时间小于5毫秒,放电时间小于10毫秒,纹波系数小于千分之一。
本文中,根据电路复杂性、输出电压质量以及开关器件的电压或电流应力,对两种驱动电路方案进行了比较。采用变压器和不可控整流器作为充电电路、电阻作为放电元件的驱动电路方案被确定为实用方案。通过建立 Simulink仿真模型和实验平台,完成了对理论分析的验证。
II. 电路结构与分析
A. 方案I:主要由变压器和不可控整流器组成的驱动电路
一种驱动电路方案(本文称为方案I),其结构采用变压器和不可控整流器作为充电电路,功率电阻作为放电元件,如图2所示。TRAIC和SCR作为充放电模式切换开关。四个二极管D1-D4和电容Co构成整流滤波电路。压电陶瓷堆的等效电容 Ceq与滤波电容Co并联连接。SCR和放电电阻(R)构成放电电路。
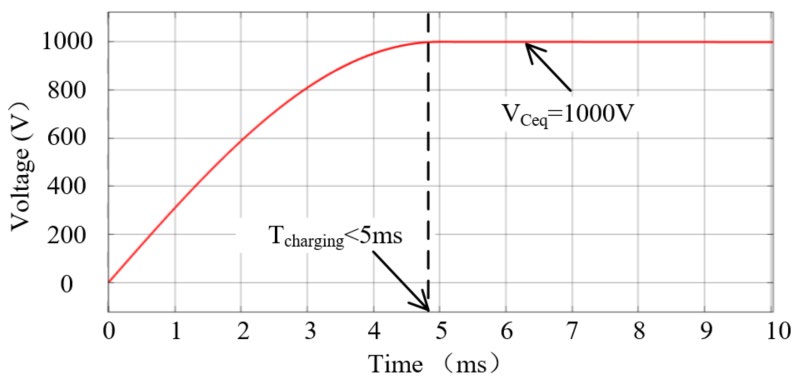
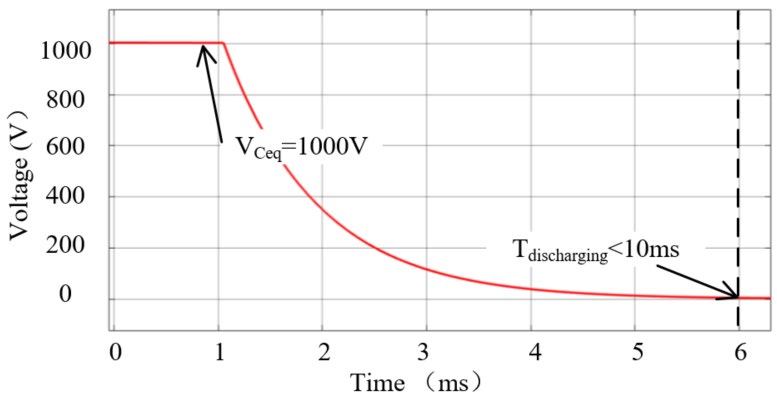
当控制器接收到充电信号时,三端双向可控硅开关元件导通,SCR关断。市电电压vin(t)首先通过变压器升压至相应幅值的输出电压vT(t),然后通过整流滤波电路将vT(t)转换为稳定的直流电压VCeq,该直流电压VCeq作为充电电压施加到电容Co和Ceq上,并迅速达到1000伏,如图3(a)所示。当控制器接收到放电信号时,三端双向可控硅开关元件关断,SCR导通。放电电阻R与Ceq串联连接,VCeq将通过电阻R快速放电,如图3(b)所示。
 充电过程,(b) 放电过程)
充电过程,(b) 放电过程)
为了计算方案I中各部分的具体元件参数,该驱动电路主要分为三个部分,即变压器、不可控整流器和放电电路,如图4所示。
 变压器, (b) 不可控整流器, (c) 放电电路)
变压器, (b) 不可控整流器, (c) 放电电路)
如图4(a)所示,当单片机控制器接收到充电信号时,TRAIC导通,vin(t)通过匝数比(n)为10:32的变压器升压至vT(t)。vT(t)的均方根(RMS)值计算为
$$
V_T = V_{in} \cdot n = 220 \times \frac{32}{10} = 704\,\text{V}
\quad (1)
$$
图4(b) 显示,vT(t) 经整流后被转换为稳定的直流电压VCeq。为了降低VCeq的纹波系数,附加的稳压电容Co与Ceq并联连接。此时,输出电压VCeq可推导为
$$
V_{Ceq} = \sqrt{2} V_T \left( \frac{1}{2} + \frac{\sin(2\theta)}{2\pi} + \frac{(R\omega(C_o + C_{eq}))^{-1}}{} \right)
\quad (2)
$$
R是不可控整流器的负载,在图4(b)中可视为无穷大。ω是vT(t)的角频率,等于50赫兹。θ是二极管的连续导通角。当Rω(Co+Ceq)的乘积增大至无穷大时,连续导通角θ接近于 0°。VCeq推导如下
$$
V_{Ceq} = \sqrt{2} V_T = \sqrt{2} \times 704 \approx 1000\,\text{V}
\quad (3)
$$
为了使VCeq的纹波系数小于1‰,将Co取为10微法。并且在图4(c)所示的放电电路中,电阻R可根据公式(4)推导,以满足放电时间要求。
$$
R \leq \frac{10 \times 10^{-3}}{5 \times 10 \times 10^{-6}} = \frac{10^{-2}}{5 \times 10^{-5}} = 200\,\Omega
\quad (4)
$$
B. 方案II:主要由不可控整流器和升压变换器组成的驱动电路
方案II采用不可控整流器和升压变换器作为充电电路,功率电阻作为放电电路,如图5所示。四个二极管(D1-D4)和电容Co构成整流滤波电路。电感L、MOSFET(Q1)、二极管D5、压电陶瓷堆等效电容 Ceq以及电阻R1构成升压变换器。Ceq和R1, R2构成放电电路。TRAIC和MOSFET(Q2)用作充电模式与放电模式之间的切换开关。
当控制器接收到充电信号时,三端双向可控硅开关元件导通,Q2关断。市电vin(t)被整流为直流电压 VCo,然后 VCo通过升压变换器升压至VCeq,如图6(a)所示。当控制器接收到放电信号时,三端双向可控硅开关元件关断且Q2导通。放电功率电阻R1和 R2与Ceq连接。Ceq无电源输入,电压VCeq将通过电阻迅速放电,如图6(b)所示。
 充电过程,(b) 放电过程)
充电过程,(b) 放电过程)
驱动电路方案II也可以分为三个部分,即不可控整流器、升压变换器和放电电路,如图7所示。
 不可控整流器, (b) 升压变换器, (c) 放电电路)
不可控整流器, (b) 升压变换器, (c) 放电电路)
图7(a)中所示的不可控整流器的分析与图4(b)类似,R是后续电路的等效负载。为了降低输出电压VCo的纹波系数,取电容Co为8毫法,VCo的平均值可达到
$$
V_{Co} = \sqrt{2} V_{in} = \sqrt{2} \times 220 \approx 311\,\text{V}
\quad (5)
$$
III. 仿真与实验
A. 仿真结果
根据计算参数建立仿真模型,仿真得到的相关波形如下所示。方案I和方案II的具体参数值见表I。图8(a)显示充电持续时间小于5ms,图8(b)显示放电持续时间小于10ms,满足要求。
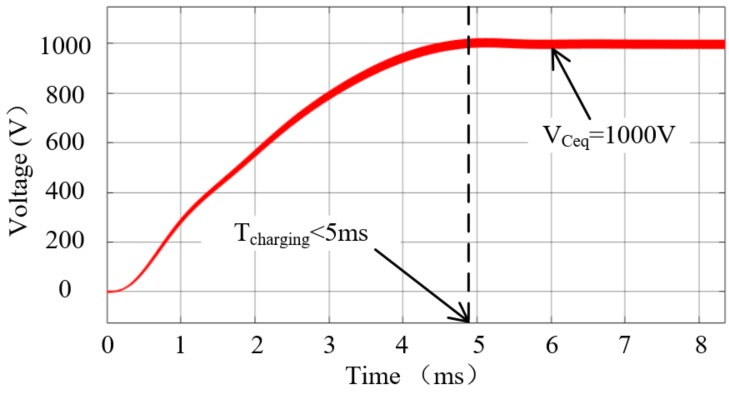
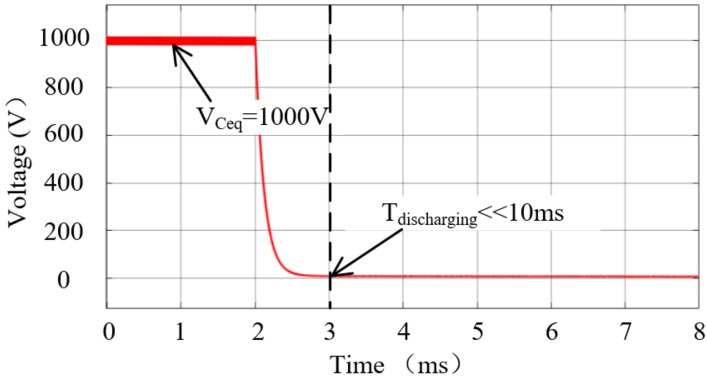
同样,图9(a)显示充电持续时间小于5毫秒,图9(b)显示放电持续时间小于10毫秒,也满足要求。
充电过程,(b) 放电过程)
充电过程,(b) 放电过程)
并对两种方案的开关器件的电压质量、控制复杂性以及电压和电流应力进行了综合比较,结论如下:
a) 方案I和方案II中的充放电持续时间和VCeq的幅值均能满足要求,但方案II的电压纹波较大。
b) 方案II需要增加闭环控制电路以确保输出电压维持在1000伏,控制电路更复杂。
c) 方案II的开关器件工作在高压侧,其电压和电流应力大于方案I。
基于上述结论,选择方案I作为实用方案,并搭建实验平台以验证分析。
充电过程,(b) 放电))
B. 实验结果
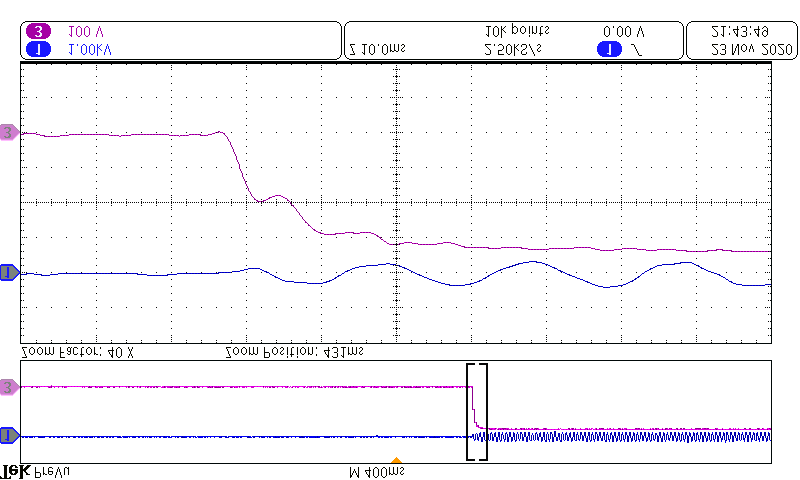
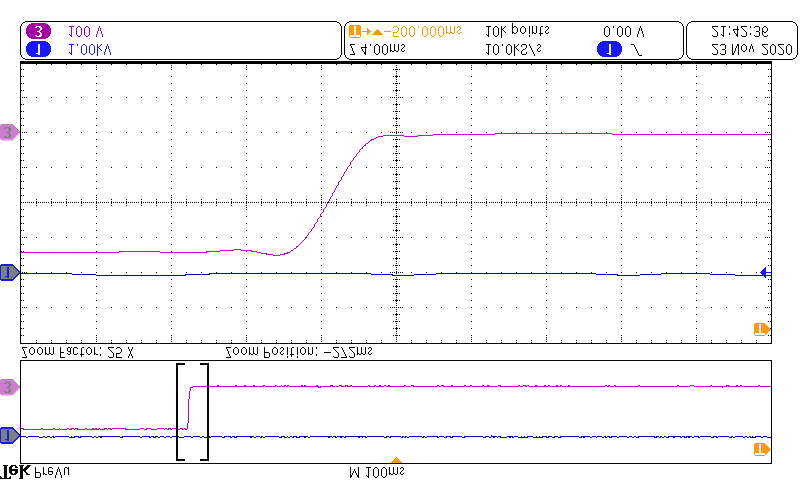
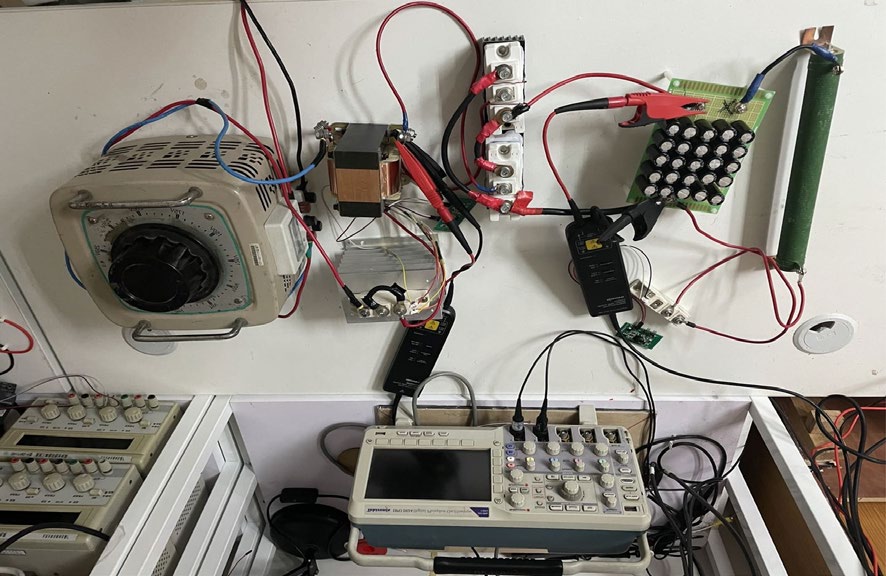
本文基于前述分析搭建了实验平台,如图11所示,并测量了相关波形。图10(a)显示充电持续时间小于5ms,图10(b)显示放电持续时间小于10ms,验证了前述分析的正确性。
IV. 结论
本文提出了一种高压充放电电路作为压电陶瓷堆叠执行器驱动电路,并建立了实验和仿真模型以验证所提电路的分析。实验和仿真结果均表明,该驱动电路能够实现对压电陶瓷堆叠执行器的充放电功能,且具有输出电压纹波小、电路结构简单和快速充放电等优点。
| 参数 | 方案I | 参数 | 方案II |
|---|---|---|---|
| Vin | 220V | Vin | 220V |
| n | 10:32 | fs | 100kHz |
| Co | 10μF | Co | 8mF |
| Ceq | 120nF | Ceq | 120nF |
| R | 100Ω | L | 20mH |
| R1 | 60kΩ | ||
| R2 | 1kΩ |


















 1609
1609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










